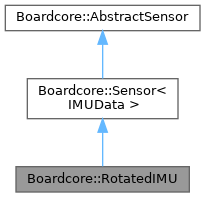
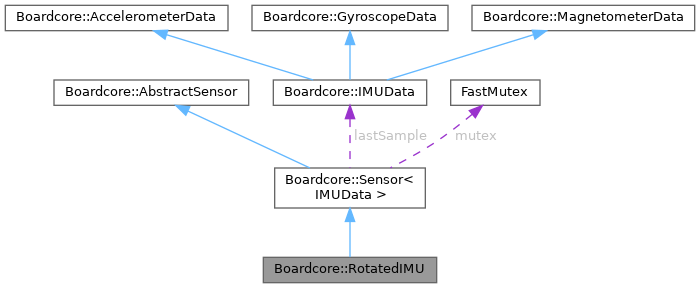
A software IMU sensor that allows applying transformations to the data after sampling via a callback. Defaults to identity transformations. More...
#include <RotatedIMU.h>
Public Types | |
| using | SampleIMUFunction = std::function< IMUData()> |
 Public Types inherited from Boardcore::Sensor< IMUData > Public Types inherited from Boardcore::Sensor< IMUData > | |
| using | DataType = IMUData |
Public Member Functions | |
| RotatedIMU (SampleIMUFunction sampleFunction) | |
| Construct a new Rotated IMU object. | |
| bool | init () override |
| Initialize the sensor. | |
| bool | selfTest () override |
| Check if the sensor is working. | |
| void | addAccTransformation (const Eigen::Matrix3f &t) |
| Multiplies the current accelerometer transformation. | |
| void | addGyroTransformation (const Eigen::Matrix3f &t) |
| Multiplies the current gyroscope transformation. | |
| void | addMagTransformation (const Eigen::Matrix3f &t) |
| Multiplies the current magnetometer transformation. | |
| void | resetTransformations () |
| Resets all the transformations to the original (Identity) ones. | |
| Public Member Functions inherited from Boardcore::Sensor< IMUData > | |
| Sensor () | |
| Sensor (Sensor &&other) | |
| virtual | ~Sensor () |
| void | sample () override |
| Sample the sensor. | |
| virtual IMUData | getLastSample () |
| Public Member Functions inherited from Boardcore::AbstractSensor | |
| virtual | ~AbstractSensor () |
| SensorErrors | getLastError () |
| Get last error for debugging purposes. Avoid silent fails. | |
Static Public Member Functions | |
| static Eigen::Matrix3f | rotateAroundX (float angle) |
| Creates a rotation matrix around the X axis. | |
| static Eigen::Matrix3f | rotateAroundY (float angle) |
| Creates a rotation matrix around the Y axis. | |
| static Eigen::Matrix3f | rotateAroundZ (float angle) |
| Creates a rotation matrix around the Z axis. | |
Protected Member Functions | |
| IMUData | sampleImpl () override |
| Read a data sample from the sensor. In case of errors, the method should return the last available correct sample. | |
Additional Inherited Members | |
| Protected Attributes inherited from Boardcore::Sensor< IMUData > | |
| DataType | lastSample |
| miosix::FastMutex | mutex |
| Protected Attributes inherited from Boardcore::AbstractSensor | |
| SensorErrors | lastError = SensorErrors::NO_ERRORS |
Detailed Description
A software IMU sensor that allows applying transformations to the data after sampling via a callback. Defaults to identity transformations.
Definition at line 39 of file RotatedIMU.h.
Member Typedef Documentation
◆ SampleIMUFunction
| using Boardcore::RotatedIMU::SampleIMUFunction = std::function<IMUData()> |
Definition at line 42 of file RotatedIMU.h.
Constructor & Destructor Documentation
◆ RotatedIMU()
|
explicit |
Construct a new Rotated IMU object.
- Parameters
-
sampleFunction Callback to retrieve accelerometer, magnetometer and gyroscope data
Definition at line 30 of file RotatedIMU.cpp.
Member Function Documentation
◆ addAccTransformation()
| void Boardcore::RotatedIMU::addAccTransformation | ( | const Eigen::Matrix3f & | t | ) |
Multiplies the current accelerometer transformation.
- Parameters
-
transformation Transformation matrix to be multiplied to the current one
Definition at line 35 of file RotatedIMU.cpp.
◆ addGyroTransformation()
| void Boardcore::RotatedIMU::addGyroTransformation | ( | const Eigen::Matrix3f & | t | ) |
Multiplies the current gyroscope transformation.
- Parameters
-
transformation Transformation matrix to be multiplied to the current one
Definition at line 36 of file RotatedIMU.cpp.
◆ addMagTransformation()
| void Boardcore::RotatedIMU::addMagTransformation | ( | const Eigen::Matrix3f & | t | ) |
Multiplies the current magnetometer transformation.
- Parameters
-
transformation Transformation matrix to be multiplied to the current one
Definition at line 37 of file RotatedIMU.cpp.
◆ init()
|
inlineoverridevirtual |
Initialize the sensor.
- Returns
- boolean value indicating whether the operation succeded or not
Implements Boardcore::AbstractSensor.
Definition at line 52 of file RotatedIMU.h.
◆ resetTransformations()
| void Boardcore::RotatedIMU::resetTransformations | ( | ) |
Resets all the transformations to the original (Identity) ones.
Definition at line 39 of file RotatedIMU.cpp.
◆ rotateAroundX()
|
static |
Creates a rotation matrix around the X axis.
- Parameters
-
angle Angle in degrees
Definition at line 46 of file RotatedIMU.cpp.
◆ rotateAroundY()
|
static |
Creates a rotation matrix around the Y axis.
- Parameters
-
angle Angle in degrees
Definition at line 60 of file RotatedIMU.cpp.
◆ rotateAroundZ()
|
static |
Creates a rotation matrix around the Z axis.
- Parameters
-
angle Angle in degrees
Definition at line 74 of file RotatedIMU.cpp.
◆ sampleImpl()
|
overrideprotectedvirtual |
Read a data sample from the sensor. In case of errors, the method should return the last available correct sample.
- Returns
- sensor data sample
Implements Boardcore::Sensor< IMUData >.
Definition at line 88 of file RotatedIMU.cpp.
◆ selfTest()
|
inlineoverridevirtual |
Check if the sensor is working.
- Returns
- boolean indicating whether the sensor is correctly working or not
Implements Boardcore::AbstractSensor.
Definition at line 53 of file RotatedIMU.h.
The documentation for this class was generated from the following files:
- src/shared/sensors/RotatedIMU/RotatedIMU.h
- src/shared/sensors/RotatedIMU/RotatedIMU.cpp