Loading...
Searching...
No Matches
Public Types |
Public Member Functions |
Static Public Attributes |
Protected Member Functions |
List of all members
Boardcore::MS5803 Class Reference
#include <MS5803.h>
Inheritance diagram for Boardcore::MS5803:
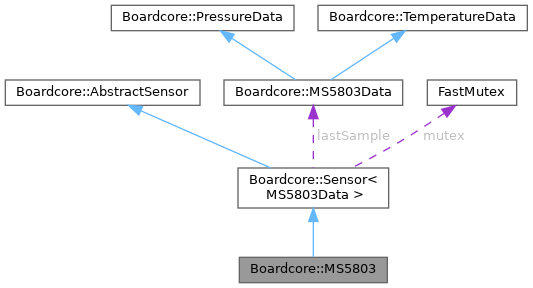
Collaboration diagram for Boardcore::MS5803:
Public Types | |
| enum | FSMStates { STATE_INIT = 0 , STATE_SAMPLED_TEMP , STATE_SAMPLED_PRESS } |
| enum | MS5803Registers : uint8_t { REG_RESET = 0x1E , REG_CONVERT_D1_256 = 0x40 , REG_CONVERT_D1_512 = 0x42 , REG_CONVERT_D1_1024 = 0x44 , REG_CONVERT_D1_2048 = 0x46 , REG_CONVERT_D1_4096 = 0x48 , REG_CONVERT_D2_256 = 0x50 , REG_CONVERT_D2_512 = 0x52 , REG_CONVERT_D2_1024 = 0x54 , REG_CONVERT_D2_2048 = 0x56 , REG_CONVERT_D2_4096 = 0x58 , REG_ADC_READ = 0x00 , REG_PROM_SENS_MASK = 0xA2 , REG_PROM_OFF_MASK = 0xA4 , REG_PROM_TCS_MASK = 0xA6 , REG_PROM_TCO_MASK = 0xA8 , REG_PROM_TREF_MASK = 0xAA , REG_PROM_TEMPSENS_MASK = 0xAC } |
 Public Types inherited from Boardcore::Sensor< MS5803Data > Public Types inherited from Boardcore::Sensor< MS5803Data > | |
| using | DataType = MS5803Data |
Public Member Functions | |
| MS5803 (SPIBusInterface &spiBus, miosix::GpioPin cs, SPIBusConfig spiConfig={}, uint16_t temperatureDivider=1) | |
| bool | init () override |
| Initialize the sensor. | |
| bool | selfTest () override |
| Check if the sensor is working. | |
| Public Member Functions inherited from Boardcore::Sensor< MS5803Data > | |
| Sensor () | |
| Sensor (Sensor &&other) | |
| virtual | ~Sensor () |
| void | sample () override |
| Sample the sensor. | |
| virtual MS5803Data | getLastSample () |
| Public Member Functions inherited from Boardcore::AbstractSensor | |
| virtual | ~AbstractSensor () |
| SensorErrors | getLastError () |
| Get last error for debugging purposes. Avoid silent fails. | |
Static Public Attributes | |
| static constexpr uint8_t | TIMEOUT = 5 |
Protected Member Functions | |
| MS5803Data | sampleImpl () override |
Additional Inherited Members | |
| Protected Attributes inherited from Boardcore::Sensor< MS5803Data > | |
| DataType | lastSample |
| miosix::FastMutex | mutex |
| Protected Attributes inherited from Boardcore::AbstractSensor | |
| SensorErrors | lastError = SensorErrors::NO_ERRORS |
Detailed Description
Member Enumeration Documentation
◆ FSMStates
◆ MS5803Registers
| enum Boardcore::MS5803::MS5803Registers : uint8_t |
Constructor & Destructor Documentation
◆ MS5803()
| Boardcore::MS5803::MS5803 | ( | SPIBusInterface & | spiBus, |
| miosix::GpioPin | cs, | ||
| SPIBusConfig | spiConfig = {}, |
||
| uint16_t | temperatureDivider = 1 |
||
| ) |
Definition at line 31 of file MS5803.cpp.
Member Function Documentation
◆ init()
|
overridevirtual |
Initialize the sensor.
- Returns
- boolean value indicating whether the operation succeded or not
Implements Boardcore::AbstractSensor.
Definition at line 39 of file MS5803.cpp.
◆ sampleImpl()
|
overrideprotectedvirtual |
Implements a state machines composed of 3 states:
- Command pressure sample
- Read Pressure sample & command temperature sample
- Read temperature sample & command pressure sample
After the first call to sample() (state 1), the machine transitions between states 2 and 3: The effective sampling rate is half the rate at which this function is called. Example: call sample() at 100 Hz -> Pressure & Temperature sample Rate = 50 Hz
Implements Boardcore::Sensor< MS5803Data >.
Definition at line 63 of file MS5803.cpp.
◆ selfTest()
|
overridevirtual |
Check if the sensor is working.
- Returns
- boolean indicating whether the sensor is correctly working or not
Implements Boardcore::AbstractSensor.
Definition at line 61 of file MS5803.cpp.
Member Data Documentation
◆ TIMEOUT
|
staticconstexpr |
The documentation for this class was generated from the following files:
- src/shared/sensors/MS5803/MS5803.h
- src/shared/sensors/MS5803/MS5803.cpp