Driver to communicate with a TLB digital-analog weight transmitter attached to a loadcell. More...
#include <MBLoadCell.h>
Public Member Functions | |
| MBLoadCell (USARTInterface &serial, LoadCellModes mode) | |
| constructor that initializes the serial communication with the load cell | |
| bool | init () override |
| Initializes the serial communication with the load cell. | |
| ReturnsStates | asciiRequest (LoadCellValuesEnum r, int value=0) |
| Generates and sends a request in ASCII mode, waits for the response and updates the lastSample structure. | |
| void | resetMaxMinWeights () |
| Permits to reset the peak weight value. | |
| void | printData () |
| Prints the last sample received. | |
| MBLoadCellData | getMaxWeight () |
| Returns a copy of the max weight detected. | |
| MBLoadCellData | getMinWeight () |
| Returns a copy of the min weight detected. | |
| bool | selfTest () override |
| Check if the sensor is working. | |
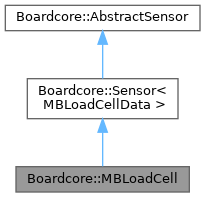
 Public Member Functions inherited from Boardcore::Sensor< MBLoadCellData > Public Member Functions inherited from Boardcore::Sensor< MBLoadCellData > | |
| Sensor () | |
| Sensor (Sensor &&other) | |
| virtual | ~Sensor () |
| void | sample () override |
| Sample the sensor. | |
| virtual MBLoadCellData | getLastSample () |
| Public Member Functions inherited from Boardcore::AbstractSensor | |
| virtual | ~AbstractSensor () |
| SensorErrors | getLastError () |
| Get last error for debugging purposes. Avoid silent fails. | |
Protected Member Functions | |
| MBLoadCellData | sampleImpl () override |
| Requests the weight sampled from the load cell or waits for a sample depending on the mode selected (it's a blocking function). | |
| MBLoadCellData | sampleContModT (void) |
| Sampling in the "continuous Mod T" mode. | |
| MBLoadCellData | sampleContModTd (void) |
| Sampling in the "continuous Mod Td" mode. | |
| MBLoadCellData | sampleAsciiModTd (void) |
| Sampling in the "ASCII Mod Td" mode. | |
| void | generateRequest (DataAsciiRequest &req, const LoadCellValuesEnum toRequest, int value=0) |
| Forges a request for the ascii mode. | |
| void | transmitASCII (const std::string &buf) |
| Wrapper to the serial sendString method. This also sets the control pins to enable the transmission mode. | |
| std::string | receiveASCII () |
| Wrapper to the serial recvString method. This also sets the control pins to enable the receiver mode. | |
| template<typename T > | |
| void | receive (T *buf) |
| Wrapper to the serial receive method. This also sets the control pins to enable the receiver mode. | |
Additional Inherited Members | |
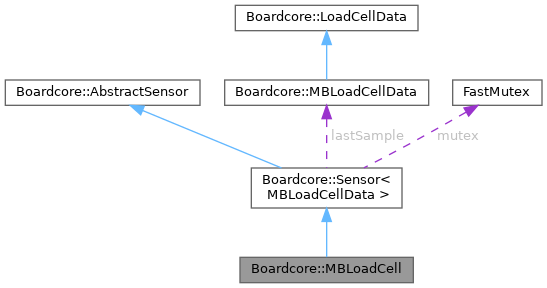
| Public Types inherited from Boardcore::Sensor< MBLoadCellData > | |
| using | DataType = MBLoadCellData |
| Protected Attributes inherited from Boardcore::Sensor< MBLoadCellData > | |
| DataType | lastSample |
| miosix::FastMutex | mutex |
| Protected Attributes inherited from Boardcore::AbstractSensor | |
| SensorErrors | lastError = SensorErrors::NO_ERRORS |
Detailed Description
Driver to communicate with a TLB digital-analog weight transmitter attached to a loadcell.
The driver allows to use the TLB transmitter in different modes:
- Continuous-modT: unidirectional protocol that consists in receiving the gross weight
- Continuous-modTd: unidirectional protocol that consists in receiving the gross weight
- ASCII-modTd: bidirectional mode that consists in sending a request and receiving a response with the data requested or an error message
Definition at line 50 of file MBLoadCell.h.
Constructor & Destructor Documentation
◆ MBLoadCell()
| Boardcore::MBLoadCell::MBLoadCell | ( | USARTInterface & | serial, |
| LoadCellModes | mode | ||
| ) |
constructor that initializes the serial communication with the load cell
- Parameters
-
mode the mode in which the load cell is in serial the serial port to be used
Definition at line 36 of file MBLoadCell.cpp.
Member Function Documentation
◆ asciiRequest()
| ReturnsStates Boardcore::MBLoadCell::asciiRequest | ( | LoadCellValuesEnum | r, |
| int | value = 0 |
||
| ) |
Generates and sends a request in ASCII mode, waits for the response and updates the lastSample structure.
Definition at line 55 of file MBLoadCell.cpp.
◆ generateRequest()
|
protected |
Forges a request for the ascii mode.
- Parameters
-
req Reference to the request that will be generated. toRequest The request to forge. value The value used in the forging of the "set point" requests.
Definition at line 253 of file MBLoadCell.cpp.
◆ getMaxWeight()
| MBLoadCellData Boardcore::MBLoadCell::getMaxWeight | ( | ) |
Returns a copy of the max weight detected.
Definition at line 152 of file MBLoadCell.cpp.
◆ getMinWeight()
| MBLoadCellData Boardcore::MBLoadCell::getMinWeight | ( | ) |
Returns a copy of the min weight detected.
Definition at line 154 of file MBLoadCell.cpp.
◆ init()
|
overridevirtual |
Initializes the serial communication with the load cell.
- Returns
- True if initialization completed with no problems, false otherwise.
Implements Boardcore::AbstractSensor.
Definition at line 43 of file MBLoadCell.cpp.
◆ printData()
| void Boardcore::MBLoadCell::printData | ( | ) |
Prints the last sample received.
Definition at line 123 of file MBLoadCell.cpp.
◆ receive()
|
protected |
Wrapper to the serial receive method. This also sets the control pins to enable the receiver mode.
- Parameters
-
buf The pointer to the buffer in which the data received will be stored.
Definition at line 298 of file MBLoadCell.cpp.
◆ receiveASCII()
|
protected |
Wrapper to the serial recvString method. This also sets the control pins to enable the receiver mode.
- Returns
- The message received.
Definition at line 284 of file MBLoadCell.cpp.
◆ resetMaxMinWeights()
| void Boardcore::MBLoadCell::resetMaxMinWeights | ( | ) |
Permits to reset the peak weight value.
Definition at line 116 of file MBLoadCell.cpp.
◆ sampleAsciiModTd()
|
protected |
Sampling in the "ASCII Mod Td" mode.
Definition at line 220 of file MBLoadCell.cpp.
◆ sampleContModT()
|
protected |
Sampling in the "continuous Mod T" mode.
Definition at line 204 of file MBLoadCell.cpp.
◆ sampleContModTd()
|
protected |
Sampling in the "continuous Mod Td" mode.
Definition at line 212 of file MBLoadCell.cpp.
◆ sampleImpl()
|
overrideprotectedvirtual |
Requests the weight sampled from the load cell or waits for a sample depending on the mode selected (it's a blocking function).
- Returns
- The weight measured from the load cell.
Implements Boardcore::Sensor< MBLoadCellData >.
Definition at line 158 of file MBLoadCell.cpp.
◆ selfTest()
|
overridevirtual |
Check if the sensor is working.
- Returns
- boolean indicating whether the sensor is correctly working or not
Implements Boardcore::AbstractSensor.
Definition at line 156 of file MBLoadCell.cpp.
◆ transmitASCII()
|
protected |
Wrapper to the serial sendString method. This also sets the control pins to enable the transmission mode.
- Parameters
-
buf The message to send.
Definition at line 275 of file MBLoadCell.cpp.
The documentation for this class was generated from the following files:
- src/shared/sensors/MBLoadCell/MBLoadCell.h
- src/shared/sensors/MBLoadCell/MBLoadCell.cpp