HILTransceiver is a Singleton and provides an easy interface for the control algorithms to send and receive data during a simulation. More...
#include <HILTransceiver.h>

Public Member Functions | |
| HILTransceiver (USART &hilSerial, HILPhasesManager< FlightPhases, SimulatorData, ActuatorData > *hilPhasesManager) | |
| Construct a serial connection attached to a control algorithm. | |
| void | setActuatorData (ActuatorData actuatorData) |
| sets the actuator data and then wakes up the MatlabTransceiver thread in order to send the data back to the simulator (called by the control algorithm) | |
| const SimulatorData * | getSensorData () const |
| returns the reference of the SimulatorData | |
| bool | isDmaEnabled () |
 Public Member Functions inherited from Boardcore::HILTransceiverBase Public Member Functions inherited from Boardcore::HILTransceiverBase | |
| HILTransceiverBase (USART &hilSerial) | |
| Construct a serial connection attached to a control algorithm. | |
| int | getLostUpdates () const |
| Returns the number of lost updates. | |
| int64_t | getTimestampSimulatorData () const |
| Returns the value in ns of the timestamp of the last received simulatorData. | |
| Public Member Functions inherited from Boardcore::ActiveObject | |
| ActiveObject (unsigned int stacksize=miosix::STACK_DEFAULT_FOR_PTHREAD, miosix::Priority priority=miosix::MAIN_PRIORITY) | |
| virtual | ~ActiveObject () |
| virtual bool | start () |
| Start the thread associated with this active object. | |
| virtual void | stop () |
| Signals the runner thread to terminate and joins the thread. | |
| bool | isRunning () |
Additional Inherited Members | |
| Protected Member Functions inherited from Boardcore::HILTransceiverBase | |
| void | waitActuatorData () |
| Waits for the control algorithm(s) to update actuatorData. | |
| Protected Member Functions inherited from Boardcore::ActiveObject | |
| bool | shouldStop () |
| Tells whether or not the ActiveObject should stop its execution. | |
| Protected Attributes inherited from Boardcore::HILTransceiverBase | |
| USART & | hilSerial |
| bool | receivedFirstPacket = false |
| bool | updated = false |
| int | nLostUpdates = 0 |
| int64_t | timestampSimulatorData = 0 |
| miosix::FastMutex | mutex |
| miosix::ConditionVariable | condVar |
| PrintLogger | logger = Logging::getLogger("HILTransceiver") |
| Protected Attributes inherited from Boardcore::ActiveObject | |
| miosix::Thread * | thread = nullptr |
| Gives access to the thread object. | |
| std::atomic< bool > | stopFlag {false} |
| std::atomic< bool > | running {false} |
Detailed Description
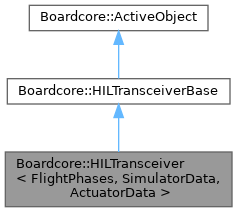
class Boardcore::HILTransceiver< FlightPhases, SimulatorData, ActuatorData >
HILTransceiver is a Singleton and provides an easy interface for the control algorithms to send and receive data during a simulation.
Definition at line 89 of file HILTransceiver.h.
Constructor & Destructor Documentation
◆ HILTransceiver()
|
inlineexplicit |
Construct a serial connection attached to a control algorithm.
- Parameters
-
hilSerial Serial port for the HIL communication.
Definition at line 97 of file HILTransceiver.h.
Member Function Documentation
◆ getSensorData()
|
inline |
returns the reference of the SimulatorData
- Returns
- reference to the data simulated by matlab
Definition at line 136 of file HILTransceiver.h.
◆ isDmaEnabled()
|
inline |
Definition at line 138 of file HILTransceiver.h.
◆ setActuatorData()
|
inline |
sets the actuator data and then wakes up the MatlabTransceiver thread in order to send the data back to the simulator (called by the control algorithm)
- Parameters
-
actuatorData sets the data that will be sent to the simulator
Definition at line 118 of file HILTransceiver.h.
The documentation for this class was generated from the following file:
- src/shared/hil/HILTransceiver.h