Loading...
Searching...
No Matches
MEA.h File Reference
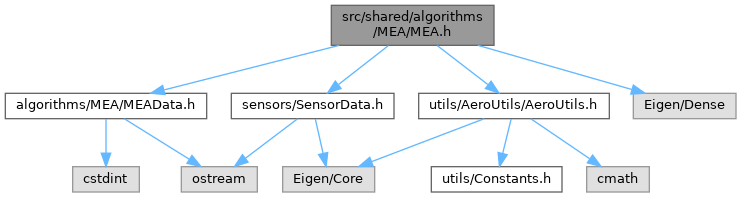
#include <algorithms/MEA/MEAData.h>#include <sensors/SensorData.h>#include <utils/AeroUtils/AeroUtils.h>#include <Eigen/Dense>
Include dependency graph for MEA.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | Boardcore::MEA |
| struct | Boardcore::MEA::Config |
| struct | Boardcore::MEA::Step |
Namespaces | |
| namespace | Boardcore |
| Driver for the VN100S IMU. | |