Loading...
Searching...
No Matches
Follower.h File Reference
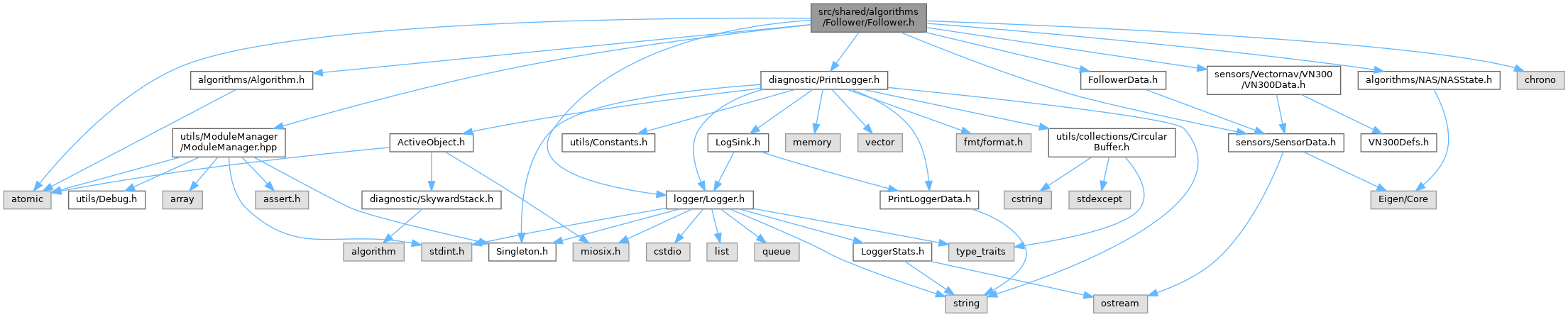
#include <algorithms/Algorithm.h>#include <algorithms/NAS/NASState.h>#include <diagnostic/PrintLogger.h>#include <logger/Logger.h>#include <sensors/SensorData.h>#include <sensors/Vectornav/VN300/VN300Data.h>#include <atomic>#include <chrono>#include <utils/ModuleManager/ModuleManager.hpp>#include "FollowerData.h"
Include dependency graph for Follower.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | Boardcore::Follower |
| Follower class to output the yaw ad pitch necessary to track from the GPS origin the rocket. Computes the angle to follow the rocket using its NAS origin, NED position and velocity. More... | |
Namespaces | |
| namespace | Boardcore |
| Driver for the VN100S IMU. | |