#include "CanInterrupt.h"#include <interfaces-impl/arch_registers_impl.h>#include <kernel/scheduler/scheduler.h>#include <miosix.h>#include "CanDriver.h"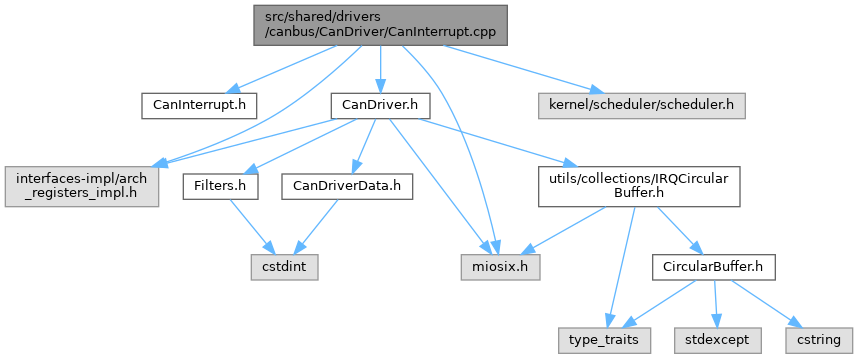
Go to the source code of this file.
Namespaces | |
| namespace | Boardcore |
| Driver for the VN100S IMU. | |
| namespace | Boardcore::Canbus |
Functions | |
| void | __attribute__ ((naked)) CAN1_RX0_IRQHandler() |
| void | __attribute__ ((used)) CAN_RXIRQHandlerImpl(int canDev |
| if (canDrivers[canDev]) canDrivers[canDev] -> handleRXInterrupt(fifo) | |
Variables | |
| CanbusDriver * | Boardcore::Canbus::canDrivers [2] |
| void int | fifo |
| void | canDev |
Function Documentation
◆ __attribute__() [1/2]
| void __attribute__ | ( | (naked) | ) |
I2C error interrupt
Implementation of the IRQHandler that is triggered when external interrupt 1 is raised.
Implementation of the IRQHandler that is triggered when external interrupt 2 is raised.
Implementation of the IRQHandler that is triggered when external interrupt 3 is raised.
Implementation of the IRQHandler that is triggered when external interrupt 4 is raised.
Implementation of the IRQHandler that is triggered when any external interrupt between 5 and 9 is raised.
Implementation of the IRQHandler that is triggered when any external interrupt between 10 and 15 is raised.
Definition at line 43 of file CanInterrupt.cpp.
◆ __attribute__() [2/2]
| void __attribute__ | ( | (used) | ) |
I2C error interrupt actual implementation
Definition at line 104 of file CanInterrupt.cpp.
◆ if()
| if | ( | canDrivers | [canDev] | ) | -> handleRXInterrupt(fifo) |
Variable Documentation
◆ canDev
| void canDev |
Definition at line 98 of file CanInterrupt.cpp.
◆ fifo
| void int fifo |
Definition at line 95 of file CanInterrupt.cpp.