Loading...
Searching...
No Matches
CanDriver.h File Reference
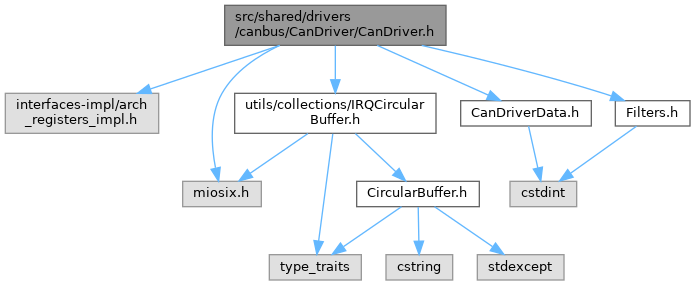
#include <interfaces-impl/arch_registers_impl.h>#include <miosix.h>#include <utils/collections/IRQCircularBuffer.h>#include <chrono>#include "CanDriverData.h"#include "Filters.h"
Include dependency graph for CanDriver.h:
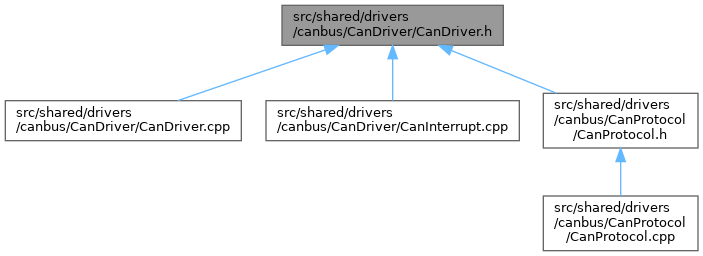
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | Boardcore::Canbus::CanbusDriver |
| Low level CanBus driver, with support for both peripherals (CAN1 and CAN2) on stm32f4 microcontrollers. More... | |
| struct | Boardcore::Canbus::CanbusDriver::CanbusConfig |
| Configuration struct for basic CanBus operation. More... | |
| struct | Boardcore::Canbus::CanbusDriver::AutoBitTiming |
| Struct defining high level bit timing requirements. Register values will then be calculated automatically. More... | |
| struct | Boardcore::Canbus::CanbusDriver::BitTiming |
| Struct specifying exact bit timing registers values. More... | |
Namespaces | |
| namespace | Boardcore |
| Driver for the VN100S IMU. | |
| namespace | Boardcore::Canbus |